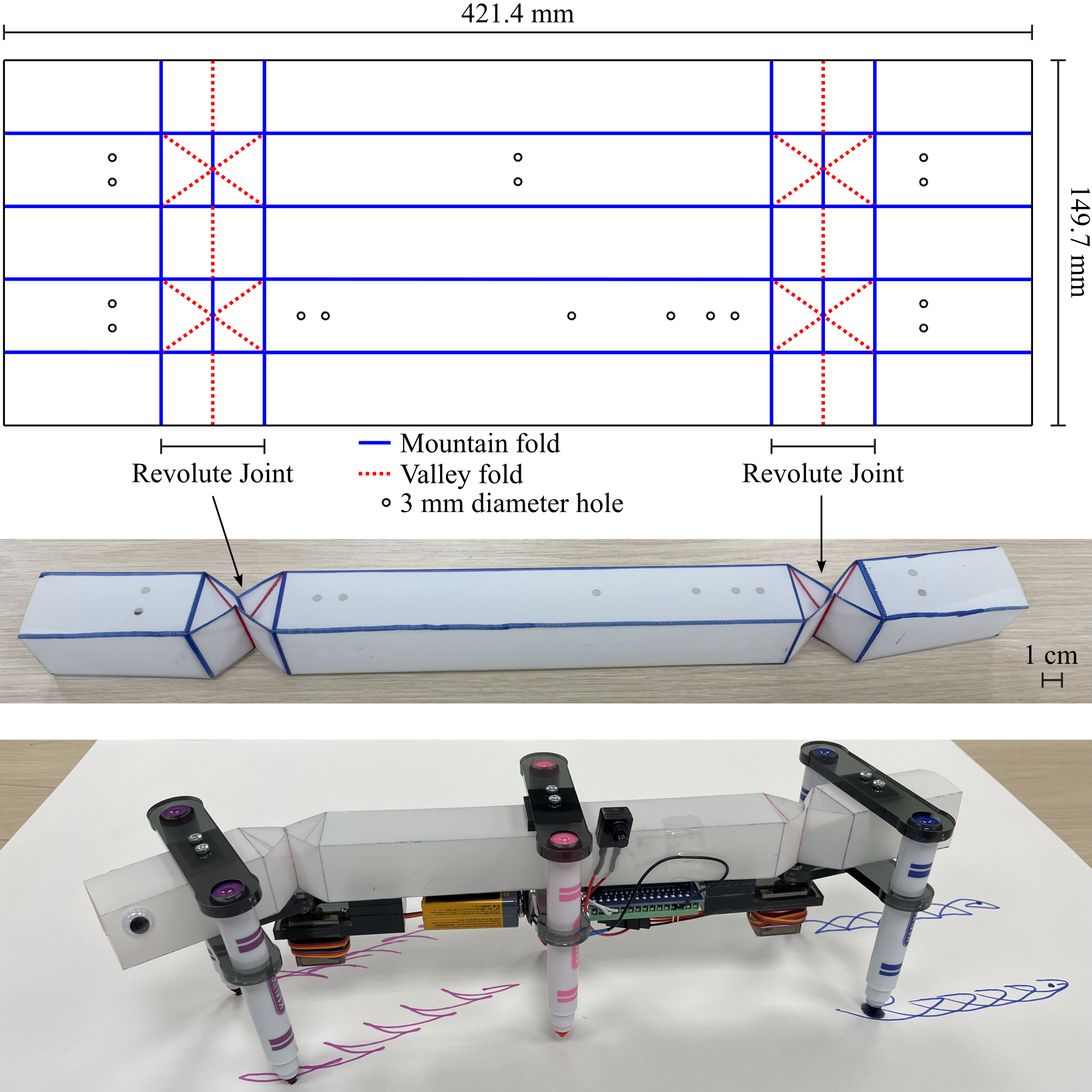
Artistic Non-Inertial Tracer (ANT): an Educational Kit for a 3-Link Origami Slithering Robot Authors: Daniel Feshbach, Alex Chi, Eric Huang, Diedra Krieger, and Cynthia SungVenue: American Society for Engineering Education (ASEE) Annual Conference and ExpositionDate: June 2025
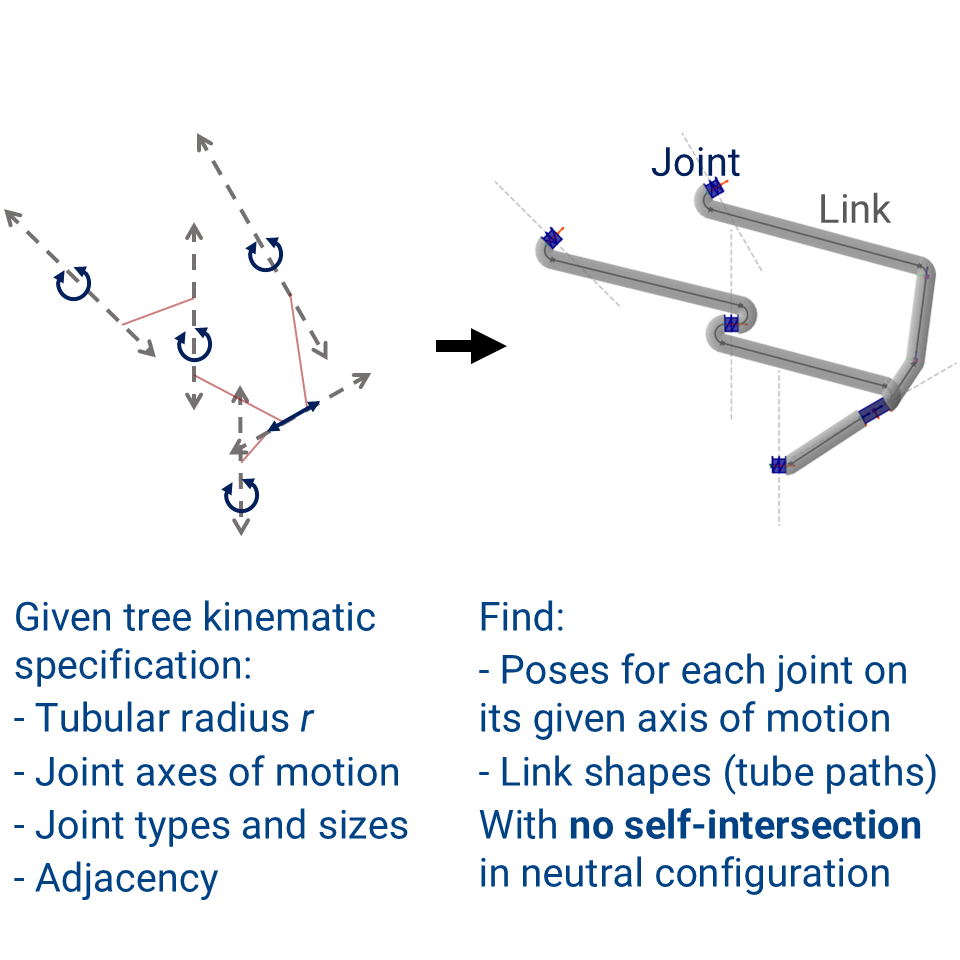
Algorithmic Design of Kinematic Trees Based on CSC Dubins Planning for Link Shapes Authors: Daniel Feshbach, Wei-Hsi Chen, Ling Xu, Emil Schaumburg, Isabella Huang, and Cynthia SungVenue: Workshop on the Algorithmic Foundations of Robotics (WAFR)Date: October 2024
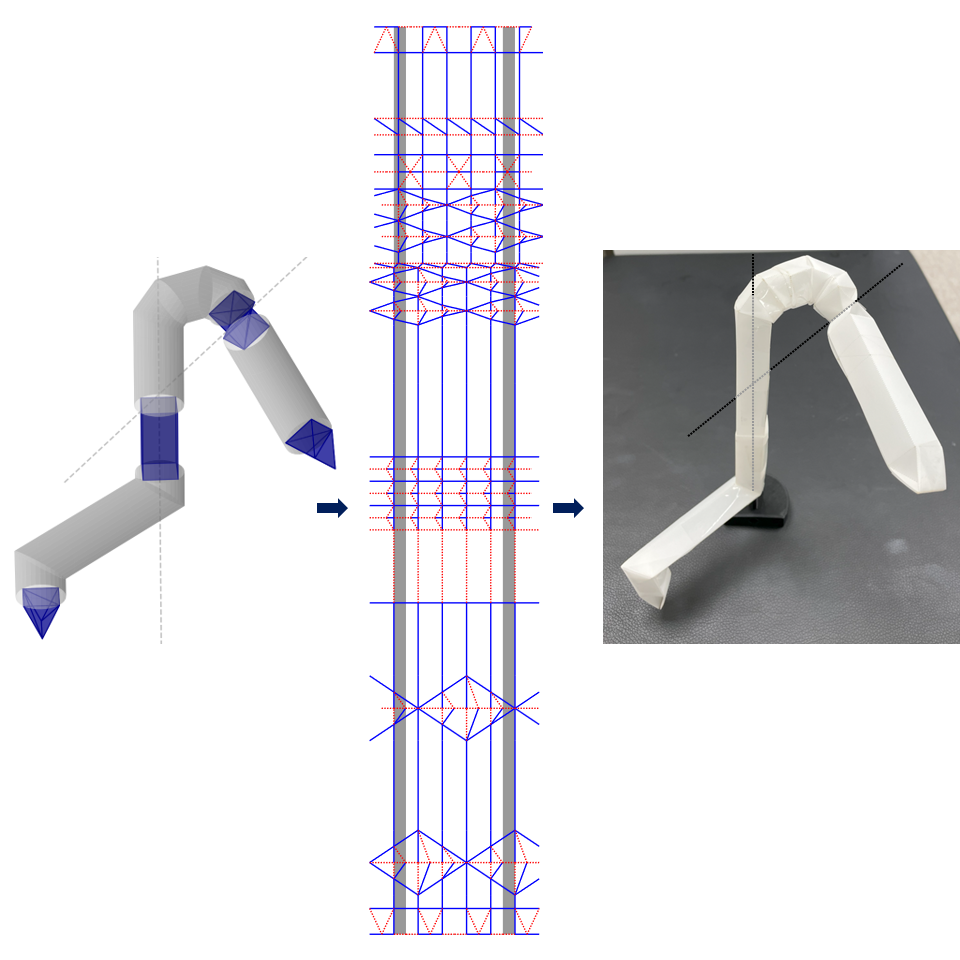
Kinegami: Open-source Software for Creating Kinematic Chains from Tubular Origami Authors: Daniel Feshbach, Wei-Hsi Chen, Daniel E. Koditschek, and Cynthia SungVenue: 8th International Meeting on Origami in Science, Mathematics, and Education (8OSME)Date: July 2024
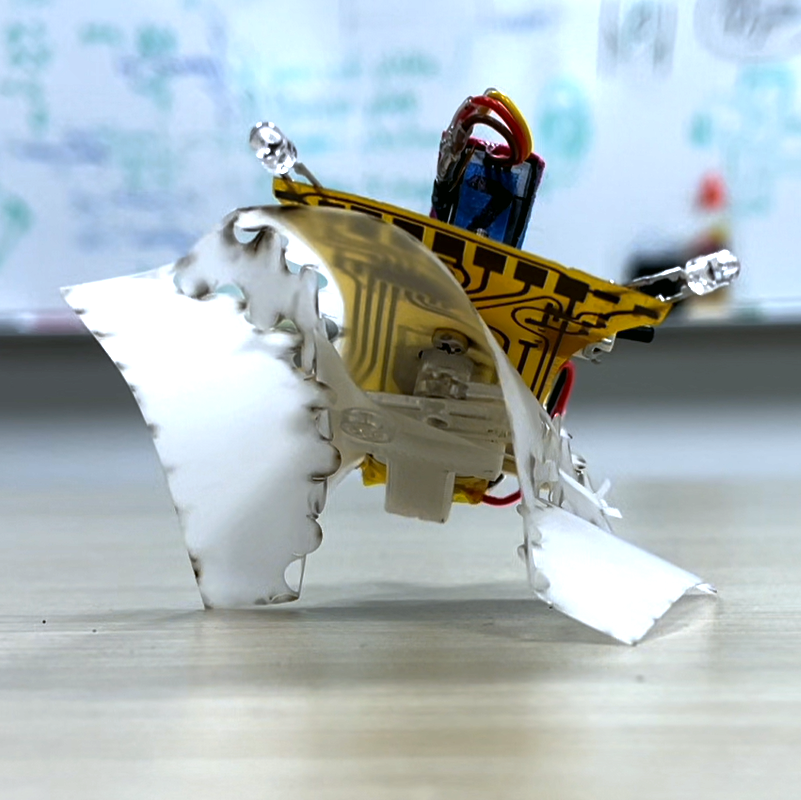
CurveQuad: A Centimeter-Scale Origami Quadruped that Leverages Curved Creases to Self-Fold and Crawl with One Motor Authors: Daniel Feshbach, Xuelin Wu, Satviki Vasireddy, Louis Beardell, Bao To, Yuliy Baryshnikov, and Cynthia SungVenue: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)Date: October 2023
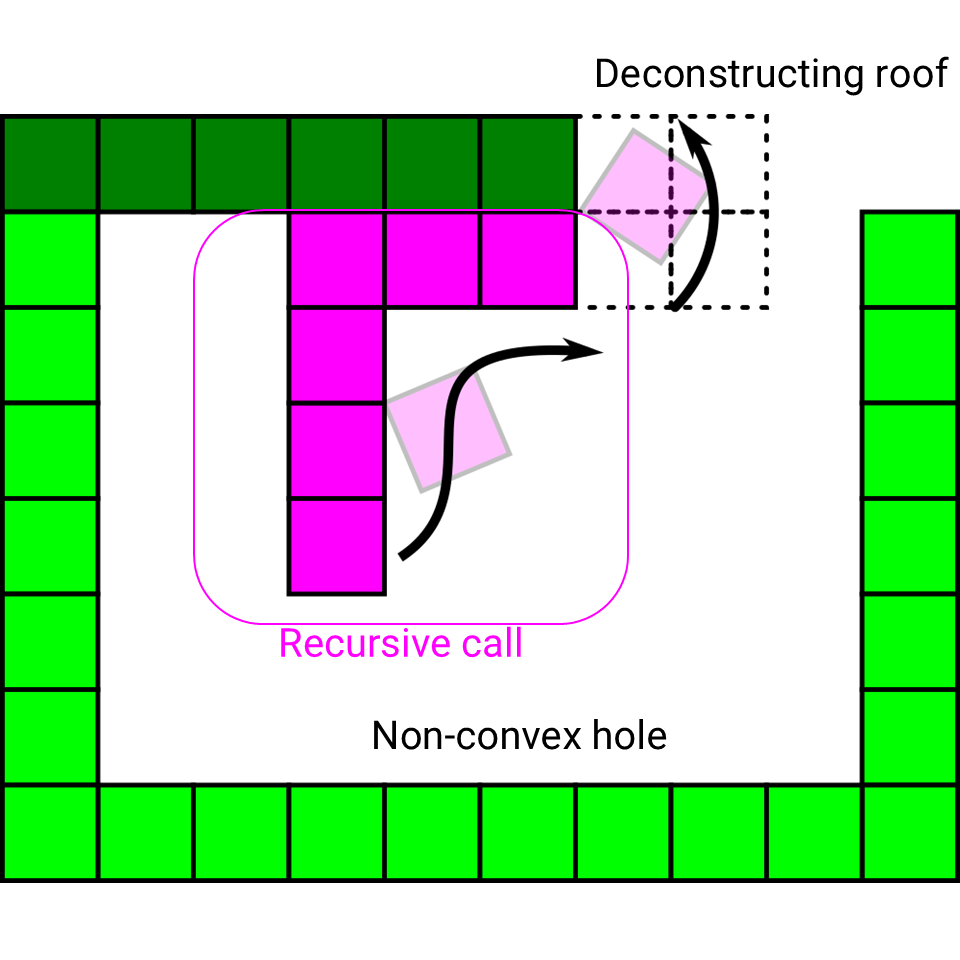
Reconfiguring Non-Convex Holes in Pivoting Modular Cube Robots Authors: Daniel Feshbach and Cynthia SungVenue: IEEE Robotics and Automation LettersDate: July 2021
Guaranteed Coverage with a Blind Unreliable Robot Authors: Jeremy S. Lewis, Daniel A. Feshbach, and Jason M. O'KaneVenue: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)Date: October 2018
Iterator-Based Optimization of Imperfectly-Nested Loops Authors: Daniel Feshbach, Mary Glaser, Michelle Strout, and David G. WonnacottVenue: IEEE International Parallel and Distributed Processing Symposium Workshops (IPDPSW)Date: May 2018