Algorithmic Design of Kinematic Trees Based on CSC Dubins Planning for Link Shapes
Published in Workshop on the Algorithmic Foundations of Robotics (WAFR), 2024
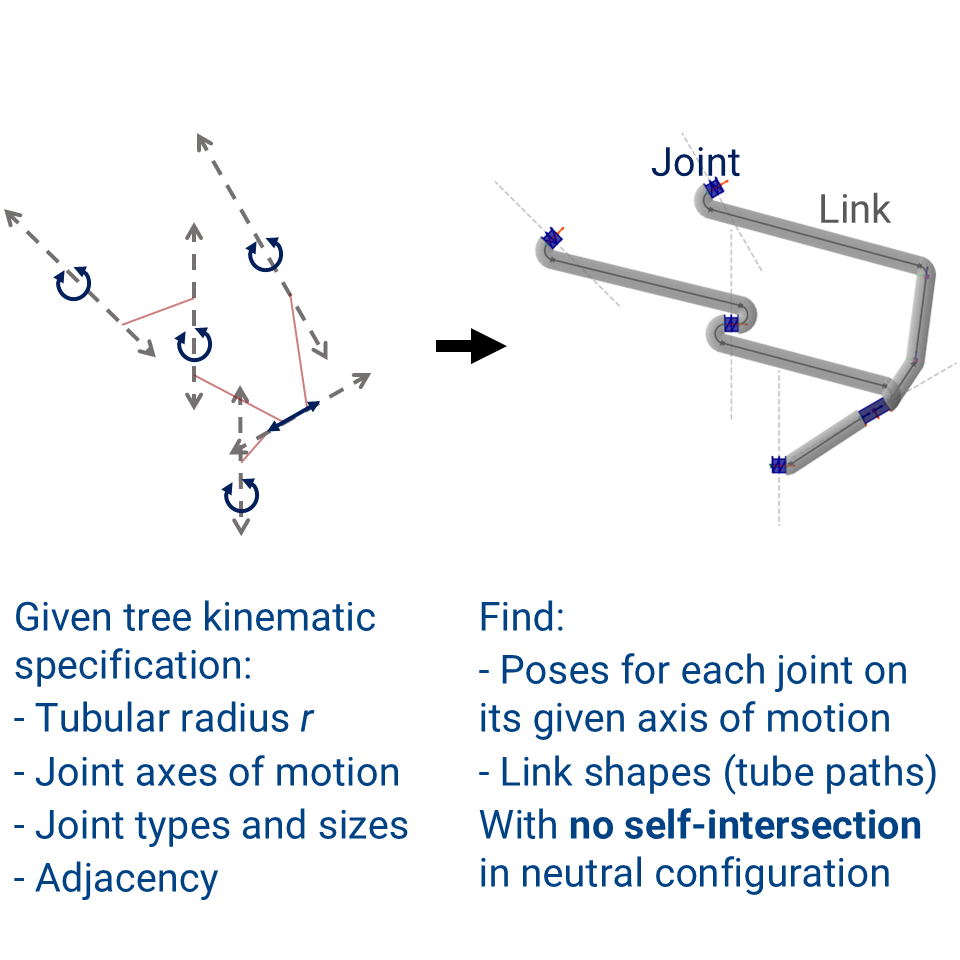
Computational tools for robot design require algorithms moving between several layers of abstraction including task, morphology, kinematics, mechanism shapes, and actuation. In this paper we give a linear-time algorithm mapping from kinematics to mechanism shape for tree-structured linkages. Specifically, we take as input a tree whose nodes are axes of motion (lines which joints rotate about or translate along) along with types and sizes for joints on these axes, and a radius $r$ for a tubular bound on the link shapes. Our algorithm outputs the geometry for a kinematic tree instantiating these specifications such that the neutral configuration has no self-intersection. The algorithm approach is based on understanding the mechanism design problem as a planning problem for link shapes, and arranging the joints along their axes of motion to be appropriately spaced and oriented such that feasible, non-intersecting paths exist linking them. Since link bending is restricted by its tubular radius, this is a Dubins planning problem, and to prove the correctness of our algorithm we also prove a theorem about Dubins paths: if two point-direction pairs are separated by a plane at least $2r$ from each, and the directions each have non-negative dot product with the plane normal, then they are connected by a radius-$r$ CSC Dubins path with turn angles $leq pi$. We implement our design algorithm in code and provide a 3D printed example of a tubular kinematic tree. The results provide an existence proof of tubular-shaped kinematic trees implementing given axes of motion, and could be used as a starting point for further optimization in an automated or algorithm-assisted robot design system.
Recommended citation: Daniel Feshbach, Wei-Hsi Chen, Ling Xu, Emil Schaumburg, Isabella Huang, and Cynthia Sung. "Algorithmic Design of Kinematic Trees Based on CSC Dubins Planning for Link Shapes." Workshop on the Algorithmic Foundations of Robotics (WAFR). 2024.
Download Paper